 |
|
|
|
|
Rocky I Rocky II Rocky III Rocky IV Bullwinkle There were four Rocky prototype rovers built at NASA's JPL leading up to the Mars Pathfinder mission. These rovers were built to show that a small rover could manuever through rough terrain and could carry enough computation and payload to carry out useful science and operate autonomously. In some sense, they were the rough terrain proof of concept of the Tooth robot which successfully demonstrated a new robot control technology called Behavior Control.
 |
|
The mechanical chassis of Rocky I was originally built by Don Bickler of JPL as a 1/8 scale model of the mobility system for a one ton Mars Rover Sample Return Mission rover. The model was then modified by David Miller and John Loch to create the robot pictured above. This robot had an onboard computer, six drive motors and four steering motors -- but no sensors. The robot was remotely controlled using a simple joystick style interface. The computer did all the neccessary calculations to interpret the joystick commands for the ten motors. Rocky I could scale steps and gaps on the order of two wheel diameters (one diameter =8cm). It could climb over rocks twice the size of the robot or smaller. Rocky I was a critical step in proving to NASA mission managers that a small rover could do useful missions on Mars.
|
|
The mechanical design for Rocky II died on the drawing board. Rocky III represented an improvement on Don Bicklers original "rocker-bogie" design, allowing for greater mobility and lower surface pressures.
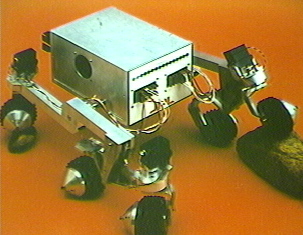
A team including David Miller, Rajiv Desai, Erann Gat, Bob Ivlev and John Loch added sensors, electronics, an arm and control to the Rocky III mechanics. The electronics were orginally housed inside a MacIntosh IIci case. The Mac computer had been removed, and the case had been filled with clinomters, power supplies, batteries, and a Motorola HC6811 micro-controller. However, when ever the press saw the robot, they assumed it was being controlled by a Macintosh. So eventually, during the summer of '91 the case was replaced by a brass box, and the version of the robot with the Mac case was retroactively renamed Rocky IIb.
The robot with the new case (Rocky III) also had a fluxgate compass and an infrared beacon detector added to it. This robot was capable of going out autonomously dozens of meters, finding a spot of soft soil (it could differentiate between picking up rock or sand), picking up some of that soil, finding its way back to the (simulated) landing craft, and putting the soil sample in a collection box. It carried out dozens of missions of this type, and also dozens of indoor demonstrations.
Rocky III displayed a combination of autonomy, mission directedness, high mobility, and manipulation ability (not to mention overall speed) that has been unmatched in planetary rover robots before or since.
|
|
|
Rocky IV was a flight prototype version of Rocky III. Its chassis was built to be extremely low mass, while strong enough to survive the flight stresses. Rocky IV also had some prototype flight instruments including a deployable seismomter and a visual spectrometer. Mounted near where the arm was located in Rocky III is a rock chipper, which could remove the weathering rind on a small area of rock visible to the spectrometer. Rocky IV use a spring loaded one-shot soil scoop underneath the chassis.
 |
|
|
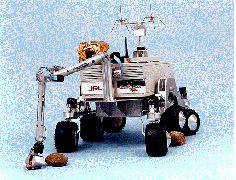
The Bullwinkle prototype was built to test out the steering mechanisms to be used on the Mars Pathfinder rover. Bullwinkle was also the first rover to be controlled via the internet and the first to make a long distance solar powered traverse (over 600 meters). Prior to the launch of Pathfinder, Bullwinkle was also the most traveled of all the rovers having visited several countries as part of the International Space University's summer program.
 |
|
|
In late 1996, NASA lauched Mars Pathfinder, a mission to land a small instrument package on the surface of Mars. The package includes a small rover. Because of mission and monetary constraints, the Pathfinder rover is not as capable as the Rocky and Bullwinkle rovers described above. None the less, it is a direct descendent of these robots, and owes its existance to the successful experiments carried out with the Rocky prototype rovers.
This page is maintained by David P. Miller. Send questions or comments to E-Mail: dmiller@kipr.org.
